機車調車無線推送視頻預警系統
- 時間:2024-11-19作者:深圳龍鐵高科技術有限公司瀏覽:199
深圳龍鐵高科技術有限公司專注于機車AI視覺系統,機車自動充電系統,機車智能駕駛系統,機車智能駕駛輔助系統,車鉤碰撞距離檢測系統,智能駕駛感知系統,司機分心駕駛檢測系統,機車500萬高清視頻系統等, 歡迎致電 13826575588
詞條
詞條說明
機車無人駕駛系統是一種高科技產品,旨在將人類從繁重和危險的駕駛任務中解脫出來,使機車在無人干預的情況下實現自主駕駛。機車無人駕駛系統通過的傳感器、計算機視覺、人工智能和大數據技術,實現了對機車環境的實時感知、決策規劃和自主控制,使機車能夠自主完成各種駕駛任務,包括但不限于:交通信號識別、道路標識識別、車輛避障、速度控制、路線規劃等。機車無人駕駛系統的工作原理主要包括以下幾個方面:感知與識別:系統通
鐵路無小事,龍鐵高科發現每一次嚴重事故的背后,都是由輕微與未逐事故,以及許多隱患形成的,很多時候,沒有發現大問題,并不表示就是的,如能及時的對輕微與未逐事故進行提前預知,而非事后分析,把有可能出現的隱患扼殺在萌芽狀態。傳統機車電子添乘系統主要是通過人員監控和錄像來實現防護,通常存在以下幾種情況:1、 在行車過程中,司乘人員無法顧及所有監控攝像機場景;2、 監控人員要24小時盯著畫面,工作強度大、疲
LR-TRADS-V300導航視覺增強技術在無人駕駛中的應用
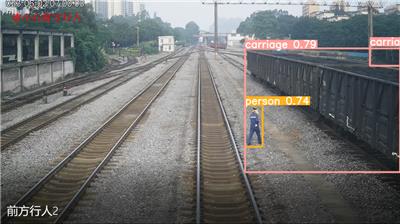
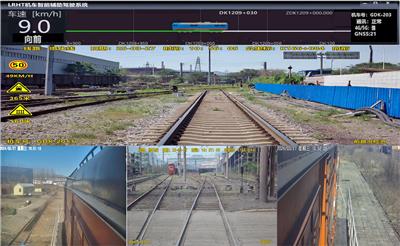
車載導航視覺增強系統的核心理念是,將車況路況場景的實時采集任務分為靜態場景記錄和動態場景識別兩部分,并利用車載導航設備和AI攝像頭分別解決。靜態場景是指所有固定的、不隨時間變化的軌道基礎設施幾何信息,如軌道線路的位置、線形、坡度,地面交通標示、信號燈位置、道口、道岔位置等。而場景動態信息則是指與時間相關的場景信息,如機車的位置和動態、信號燈的顏色、前方出現的行人、車輛和障礙物等。靜態場景記錄是利用
深度卷積神經網絡的特征檢測通過訓練數據來進行學習,避免手工顯式提取特征,而是從訓練中學習特征,且同一特征映射面上的神經元權值相同,網絡可以并行學習,權值共享降低了網絡的復雜性,可以將多維的圖像數據直接輸入到網絡中,從而避免特征提取和分類過程中數據重建的復雜度,項目擬采用卷積神經網絡無監督構建特征,通過卷積神經網絡的前向傳播、反向傳播以及梯度下降三個階段的反復迭代,自適應提取圖像的特征向量,實現圖
聯系方式 聯系我時,請告知來自八方資源網!
公司名: 深圳龍鐵高科技術有限公司
聯系人: 邵旺龍
電 話: 0755-82596822
手 機: 13826575588
微 信: 13826575588
地 址: 廣東深圳龍崗南灣街道布沙路深馬工業園A棟502A-502B-502C
郵 編:
網 址: fujilong.b2b168.com
相關推薦




相關閱讀
1、本信息由八方資源網用戶發布,八方資源網不介入任何交易過程,請自行甄別其真實性及合法性;
2、跟進信息之前,請仔細核驗對方資質,所有預付定金或付款至個人賬戶的行為,均存在詐騙風險,請提高警惕!
- 聯系方式
公司名: 深圳龍鐵高科技術有限公司
聯系人: 邵旺龍
手 機: 13826575588
電 話: 0755-82596822
地 址: 廣東深圳龍崗南灣街道布沙路深馬工業園A棟502A-502B-502C
郵 編:
網 址: fujilong.b2b168.com
- 相關企業
- 深圳市凡可為科技有限公司
- 上海分朗智能科技有限公司
- 深圳市鵬鑫威科技有限公司
- 深圳頭程國際貨運代理有限公司
- 深圳市達普通訊有限公司
- 深圳市科華爾科技有限公司
- 廣州市旺東電子科技有限公司
- 深圳市保駕科技有限公司
- 廣州市騰廣電子科技有限公司
- 商家產品系列
- 產品推薦
- 資訊推薦



¥370.00





¥1098.00



¥1200.00
